-
1 переходить на другой диапазон
Engineering: change over to another rangeУниверсальный русско-английский словарь > переходить на другой диапазон
-
2 коробка передач с установленным за ней редуктором, включаемым специальным рычагом при переходе на другой диапазон передаточных чисел
auto. Mehrbereichs-Gruppengetriebe, MehrbereichsgetriebeУниверсальный русско-немецкий словарь > коробка передач с установленным за ней редуктором, включаемым специальным рычагом при переходе на другой диапазон передаточных чисел
-
3 переход на другой диапазон
nelectr. BereichswechselnУниверсальный русско-немецкий словарь > переход на другой диапазон
-
4 перенос частоты
Communications: frequency translation (в другой диапазон) -
5 переносить частоту
Makarov: translate a frequency (в другой диапазон)Универсальный русско-английский словарь > переносить частоту
-
6 коробка передач с задним
ngener. Rangegetriebe (коробка передач с установленным за ней редуктором, включаемым специальным рычагом только при переходе на другой диапазон передаточных чисел; схемы переключения ступеней при работе в разных диапазонах одинаковы)Универсальный русско-немецкий словарь > коробка передач с задним
-
7 перенос
carry вчт., ( на другую строку) folding, ( слова) hyphenation, junction хим., (клеток, вируса) passage, ( материала при трении) pickup, transfer, transference, ( заряда) transit, translation, transport, transportation, ( членов равенства) transposition* * *перено́с м.1. ( кинетические явления) transfer, transport2. мат., вчт. carryблоки́ровать перено́с вчт. — suppress carryперено́с в какой-л. разря́д вчт. — carry into a digit placeперено́с возника́ет вчт. — a carry is generatedперено́с из какого-л. разря́да вчт. — carry out of [from] a digit placeперено́с из ста́ршего разря́да добавля́ется к мла́дшему разря́ду вчт. — the carry out of the most significant position [digit] is added into the least signifiant position [digit]произвести́ перено́с вчт. — forward [execute] a carryперено́с вещества́ — mass transfer, mass transportперено́с ви́хря (ско́рости) — vorticity transferгруппово́й перено́с вчт. — block carryдвои́чный перено́с — binary carryдесяти́чный перено́с — decimal carryдиффузио́нный перено́с1. физ. diffusive transfer2. кфт. transfer diffusion, image transfer by diffusionзаде́ржанный перено́с вчт. — delayed carryперено́с заря́да — charge transferперено́с заря́да, эстафе́тный — relay-race charge transferперено́с излуче́ния — radiative transport, radiation transferкаска́дный перено́с — cascaded [step-by-step] carryперено́с ко́пии полигр. — layingперено́с ко́пии, мо́крый полигр. — wet layingперено́с ко́пии, сухо́й полигр. — dry layingлучи́стый перено́с — radiative transport, radiation transferперено́с ма́ссы — mass transfer, mass transportперено́с материа́ла ( при трении твёрдых тел) — transfer of materialмежфа́зный перено́с — interphase transferперено́с мета́лла — metal transferмолекуля́рный перено́с — molecular transportодновреме́нный перено́с — simultaneous carryперено́с осе́й (координа́т) — translation or (coordinate) axesперено́с радиоакти́вности — radioactivity transportсквозно́й перено́с вчт. — ripple-through carryсквозно́й перено́с че́рез девя́тки ( в десятичной системе) — standing-on-nines carryсквозно́й перено́с че́рез едини́цы ( в двоичной системе) — standing-on-ones carryперено́с тепла́ — heat transfer, heat transportперено́с фотографи́ческого изображе́ния (на другу́ю подло́жку) — transfer processцикли́ческий перено́с вчт. — end-around carryчасти́чный перено́с — partial carryперено́с частоты́ ( в другой диапазон) свз. — frequency translationперено́с эне́ргии — transfer of energyперено́с эне́ргии, диффузио́нный — energy transfer by (a) diffusion (mechanism)перено́с эне́ргии, индукти́вно-резона́нсный — energy transfer by (an) inductive resonance (mechanism)перено́с эне́ргии, эксито́нный — energy transfer by excitons [by an exciton mechanism] -
8 переносить
carry, ( слово) hyphenate, transfer, translate, transport, ( члены равенства) transpose* * *переноси́ть гл.1. carry, conveyпереноси́ть анало́гию на … — carry the analogy over to …2. (массу, тепло, энергию) transfer, transportпереноси́ть частоту́ ( в другой диапазон) — translate a frequencyпереноси́ть член(ы) уравне́ния мат. — transpose the term(s) of an equation -
9 неопределенность
неопределённость
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
3.2 неопределенность (uncertainty): Оценка, приписанная результату измерений, которая характеризует диапазон значений, внутри которого, как можно ожидать, лежит истинное значение.
Примечание - В общем случае неопределенность измерений включает многие составляющие. Некоторые из них могут быть оценены на основе статистического распределения результатов ряда измерений и охарактеризованы экспериментальным стандартным отклонением (среднеквадратическим отклонением - СКО). Оценки других составляющих могут основываться только на опыте или другой информации.
Источник: ГОСТ 31371.2-2008: Газ природный. Определение состава методом газовой хроматографии с оценкой неопределенности. Часть 2. Характеристики измерительной системы и статистические оценки данных оригинал документа
3.20 неопределенность (uncertainty): Параметр, связанный с результатом измерения и характеризующий дисперсию (разброс) значений, которые могут быть обоснованно приписаны измеряемой величине.
[VIM:1993, 3.9]
Примечание - Неопределенность результата измерения может быть описана с помощью (суммарной) стандартной неопределенности или с помощью расширенной неопределенности с установленной доверительной вероятностью.
Источник: ГОСТ Р ИСО 11222-2006: Качество воздуха. Оценка неопределенности измерений характеристик качества воздуха, полученных усреднением по времени оригинал документа
2.37 неопределенность (uncertainty): Параметр, ассоциируемый с результатом количественного определения, который характеризует разброс значений, относящихся к количественной величине.
Примечание - Неопределенность (погрешность) устанавливает, как правило, количественную оценку вероятного или предполагаемого разброса значений и качественное описание вероятных причин разброса.
Источник: ГОСТ Р ИСО 14064-1-2007: Газы парниковые. Часть 1. Требования и руководство по количественному определению и отчетности о выбросах и удалении парниковых газов на уровне организации оригинал документа
2.30 неопределенность (uncertainty): Параметр, ассоциируемый с результатом количественного определения, который характеризует разброс значений, относящихся к количественной величине.
Примечание - Неопределенность (погрешность) устанавливает, как правило, количественную оценку вероятного или предполагаемого разброса значений и качественное описание вероятных причин разброса.
Источник: ГОСТ Р ИСО 14064-2-2007: Газы парниковые. Часть 2. Требования и руководство по количественной оценке, мониторингу и составлению отчетной документации на проекты сокращения выбросов парниковых газов или увеличения их удаления на уровне проекта оригинал документа
2.38 неопределенность (uncertainty): Параметр, ассоциируемый с результатом количественного определения, который характеризует разброс значений, относящихся к количественной величине.
Примечание - Неопределенность (погрешность) устанавливает, как правило, количественную оценку вероятного или предполагаемого разброса значений и качественное описание вероятных причин разброса.
Источник: ГОСТ Р ИСО 14064-3-2007: Газы парниковые. Часть 3. Требования и руководство по валидации и верификации утверждений, касающихся парниковых газов оригинал документа
3.7 неопределенность (uncertainty): Оценка, приписанная результату измерения, которая характеризует диапазон значений, внутри которого, как можно ожидать, лежит истинное значение.
Примечание - В общем случае неопределенность измерений включает много составляющих. Некоторые из них могут быть оценены из статистического распределения результатов ряда измерений и охарактеризованы стандартным отклонением (среднеквадратическим отклонением - СКО). Оценки других составляющих могут основываться только на предыдущем опыте или другой информации.
Источник: ГОСТ 31371.1-2008: Газ природный. Определение состава методом газовой хроматографии с оценкой неопределенности. Часть 1. Руководство по проведению анализа оригинал документа
3.29 неопределенность (uncertainty): Количественная характеристика ошибки (случайной и/или систематической), соответствующей результатам наблюдений, значениям переменных, параметров, математических выражений или неизвестных величин.
Примечание - См. «распространение неопределенности».
Источник: ГОСТ Р 51901.10-2009: Менеджмент риска. Процедуры управления пожарным риском на предприятии оригинал документа
Русско-английский словарь нормативно-технической терминологии > неопределенность
-
10 трехфазный источник бесперебойного питания (ИБП)
трехфазный ИБП
-
[Интент]
Глава 7. Трехфазные ИБП... ИБП большой мощности (начиная примерно с 10 кВА) как правило предназначены для подключения к трехфазной электрической сети. Диапазон мощностей 8-25 кВА – переходный. Для такой мощности делают чисто однофазные ИБП, чисто трехфазные ИБП и ИБП с трехфазным входом и однофазным выходом. Все ИБП, начиная примерно с 30 кВА имеют трехфазный вход и трехфазный выход. Трехфазные ИБП имеют и другое преимущество перед однофазными ИБП. Они эффективно разгружают нейтральный провод от гармоник тока и способствуют более безопасной и надежной работе больших компьютерных систем. Эти вопросы рассмотрены в разделе "Особенности трехфазных источников бесперебойного питания" главы 8. Трехфазные ИБП строятся обычно по схеме с двойным преобразованием энергии. Поэтому в этой главе мы будем рассматривать только эту схему, несмотря на то, что имеются трехфазные ИБП, построенные по схеме, похожей на ИБП, взаимодействующий с сетью.
Схема трехфазного ИБП с двойным преобразованием энергии приведена на рисунке 18.
Рис.18. Трехфазный ИБП с двойным преобразованием энергииКак видно, этот ИБП не имеет почти никаких отличий на уровне блок-схемы, за исключением наличия трех фаз. Для того, чтобы увидеть отличия от однофазного ИБП с двойным преобразованием, нам придется (почти впервые в этой книге) несколько подробнее рассмотреть элементы ИБП. Мы будем проводить это рассмотрение, ориентируясь на традиционную технологию. В некоторых случаях будут отмечаться схемные особенности, позволяющие улучшить характеристики.
Выпрямитель
Слева на рис 18. – входная электрическая сеть. Она включает пять проводов: три фазных, нейтраль и землю. Между сетью и ИБП – предохранители (плавкие или автоматические). Они позволяют защитить сеть от аварии ИБП. Выпрямитель в этой схеме – регулируемый тиристорный. Управляющая им схема изменяет время (долю периода синусоиды), в течение которого тиристоры открыты, т.е. выпрямляют сетевое напряжение. Чем большая мощность нужна для работы ИБП, тем дольше открыты тиристоры. Если батарея ИБП заряжена, на выходе выпрямителя поддерживается стабилизированное напряжение постоянного тока, независимо от нвеличины напряжения в сети и мощности нагрузки. Если батарея требует зарядки, то выпрямитель регулирует напряжение так, чтобы в батарею тек ток заданной величины.
Такой выпрямитель называется шести-импульсным, потому, что за полный цикл трехфазной электрической сети он выпрямляет 6 полупериодов сингусоиды (по два в каждой из фаз). Поэтому в цепи постоянного тока возникает 6 импульсов тока (и напряжения) за каждый цикл трехфазной сети. Кроме того, во входной электрической сети также возникают 6 импульсов тока, которые могут вызвать гармонические искажения сетевого напряжения. Конденсатор в цепи постоянного тока служит для уменьшения пульсаций напряжения на аккумуляторах. Это нужно для полной зарядки батареи без протекания через аккумуляторы вредных импульсных токов. Иногда к конденсатору добавляется еще и дроссель, образующий совместно с конденсатором L-C фильтр.
Коммутационный дроссель ДР уменьшает импульсные токи, возникающие при открытии тиристоров и служит для уменьшения искажений, вносимых выпрямителем в электрическую сеть. Для еще большего снижения искажений, вносимых в сеть, особенно для ИБП большой мощности (более 80-150 кВА) часто применяют 12-импульсные выпрямители. Т.е. за каждый цикл трехфазной сети на входе и выходе выпрямителя возникают 12 импульсов тока. За счет удвоения числа импульсов тока, удается примерно вдвое уменьшить их амплитуду. Это полезно и для аккумуляторов и для электрической сети.
Двенадцати-импульсный выпрямитель фактически состоит из двух 6-импульсных выпрямителей. На вход второго выпрямителя (он изображен ниже на рис. 18) подается трехфазное напряжение, прошедшее через трансформатор, сдвигающий фазу на 30 градусов.
В настоящее время применяются также и другие схемы выпрямителей трехфазных ИБП. Например схема с пассивным (диодным) выпрямителем и преобразователем напряжения постоянного тока, применение которого позволяет приблизить потребляемый ток к синусоидальному.
Наиболее современным считается транзисторный выпрямитель, регулируемый высокочастотной схемой широтно-импульсной модуляции (ШИМ). Применение такого выпрямителя позволяет сделать ток потребления ИБП синусоидальным и совершенно отказаться от 12-импульсных выпрямителей с трансформатором.
Батарея
Для формирования батареи трехфазных ИБП (как и в однофазных ИБП) применяются герметичные свинцовые аккумуляторы. Обычно это самые распространенные модели аккумуляторов с расчетным сроком службы 5 лет. Иногда используются и более дорогие аккумуляторы с большими сроками службы. В некоторых трехфазных ИБП пользователю предлагается фиксированный набор батарей или батарейных шкафов, рассчитанных на различное время работы на автономном режиме. Покупая ИБП других фирм, пользователь может более или менее свободно выбирать батарею своего ИБП (включая ее емкость, тип и количество элементов). В некоторых случаях батарея устанавливается в корпус ИБП, но в большинстве случаев, особенно при большой мощности ИБП, она устанавливается в отдельном корпусе, а иногда и в отдельном помещении.
Инвертор
Как и в ИБП малой мощности, в трехфазных ИБП применяются транзисторные инверторы, управляемые схемой широтно-импульсной модуляции (ШИМ). Некоторые ИБП с трехфазным выходом имеют два инвертора. Их выходы подключены к трансформаторам, сдвигающим фазу выходных напряжений. Даже в случае применения относительно низкочастоной ШИМ, такая схема совместно с применением фильтра переменного тока, построенного на трансформаторе и конденсаторах, позволяет обеспечить очень малый коэффициент гармонических искажений на выходе ИБП (до 3% на линейной нагрузке). Применение двух инверторов увеличивает надежность ИБП, поскольку даже при выходе из строя силовых транзисторов одного из инверторов, другой инвертор обеспечит работу нагрузки, пусть даже при большем коэффициенте гармонических искажений.
В последнее время, по мере развития технологии силовых полупроводников, начали применяться более высокочастотные транзисторы. Частота ШИМ может составлять 4 и более кГц. Это позволяет уменьшить гармонические искажения выходного напряжения и отказаться от применения второго инвертора. В хороших ИБП существуют несколько уровней защиты инвертора от перегрузки. При небольших перегрузках инвертор может уменьшать выходное напряжение (пытаясь снизить ток, проходящий через силовые полупроводники). Если перегрузка очень велика (например нагрузка составляет более 125% номинальной), ИБП начинает отсчет времени работы в условиях перегрузки и через некоторое время (зависящее от степени перегрузки – от долей секунды до минут) переключается на работу через статический байпас. В случае большой перегрузки или короткого замыкания, переключение на статический байпас происходит сразу.
Некоторые современные высококлассные ИБП (с высокочакстотной ШИМ) имеют две цепи регулирования выходного напряжения. Первая из них осуществляет регулирование среднеквадратичного (действующего) значения напряжения, независимо для каждой из фаз. Вторая цепь измеряет мгновенные значения выходного напряжения и сравнивает их с хранящейся в памяти блока управления ИБП идеальной синусоидой. Если мгновенное значение напряжения отклонилось от соотвествующего "идеального" значения, то вырабатывается корректирующий импульс и форма синусоиды выходного напряжения исправляется. Наличие второй цепи обратной связи позволяет обеспечить малые искажения формы выходного напряжения даже при нелинейных нагрузках.
Статический байпас
Блок статического байпаса состоит из двух трехфазных (при трехфазном выходе) тиристорных переключателей: статического выключателя инвертора (на схеме – СВИ) и статического выключателя байпаса (СВБ). При нормальной работе ИБП (от сети или от батареи) статический выключатель инвертора замкнут, а статический выключатель байпаса разомкнут. Во время значительных перегрузок или выхода из строя инвертора замкнут статический переключатель байпаса, переключатель инвертора разомкнут. В момент переключения оба статических переключателя на очень короткое время замкнуты. Это позволяет обеспечить безразрывное питание нагрузки.
Каждая модель ИБП имеет свою логику управления и, соответственно, свой набор условий срабатывания статических переключателей. При покупке ИБП бывает полезно узнать эту логику и понять, насколько она соответствует вашей технологии работы. В частности хорошие ИБП сконструированы так, чтобы даже если байпас недоступен (т.е. отсутствует синхронизация инвертора и байпаса – см. главу 6) в любом случае постараться обеспечить электроснабжение нагрузки, пусть даже за счет уменьшения напряжения на выходе инвертора.
Статический байпас ИБП с трехфазным входом и однофазным выходом имеет особенность. Нагрузка, распределенная на входе ИБП по трем фазным проводам, на выходе имеет только два провода: один фазный и нейтральный. Статический байпас тоже конечно однофазный, и синхронизация напряжения инвертора производится относительно одной из фаз трехфазной сети (любой, по выбору пользователя). Вся цепь, подводящая напряжение к входу статического байпаса должна выдерживать втрое больший ток, чем входной кабель выпрямителя ИБП. В ряде случаев это может вызвать трудности с проводкой.
Сервисный байпас
Трехфазные ИБП имеют большую мощность и обычно устанавливаются в местах действительно критичных к электропитанию. Поэтому в случае выхода из строя какого-либо элемента ИБП или необходимости проведения регламентных работ (например замены батареи), в большинстве случае нельзя просто выключить ИБП или поставить на его место другой. Нужно в любой ситуации обеспечить электропитание нагрузки. Для этих ситуаций у всех трехфазных ИБП имеется сервисный байпас. Он представляет собой ручной переключатель (иногда как-то заблокированный, чтобы его нельзя было включить по ошибке), позволяющий переключить нагрузку на питание непосредственно от сети. У большинства ИБП для переключения на сервисный байпас существует специальная процедура (определенная последовательность действий), которая позволяет обеспечит непрерывность питания при переключениях.
Режимы работы трехфазного ИБП с двойным преобразованием
Трехфазный ИБП может работать на четырех режимах работы.
- При нормальной работе нагрузка питается по цепи выпрямитель-инвертор стабилизированным напряжением, отфильтрованным от импульсов и шумов за счет двойного преобразования энергии.
- Работа от батареи. На это режим ИБП переходит в случае, если напряжение на выходе ИБП становится таким маленьким, что выпрямитель оказывается не в состоянии питать инвертор требуемым током, или выпрямитель не может питать инвертор по другой причине, например из-за поломки. Продолжительность работы ИБП от батареи зависит от емкости и заряда батареи, а также от нагрузки ИБП.
- Когда какой-нибудь инвертор выходит из строя или испытывает перегрузку, ИБП безразрывно переходит на режим работы через статический байпас. Нагрузка питается просто от сети через вход статического байпаса, который может совпадать или не совпадать со входом выпрямителя ИБП.
- Если требуется обслуживание ИБП, например для замены батареи, то ИБП переключают на сервисный байпас. Нагрузка питается от сети, а все цепи ИБП, кроме входного выключателя сервисного байпаса и выходных выключателей отделены от сети и от нагрузки. Режим работы на сервисном байпасе не является обязательным для небольших однофазных ИБП с двойным преобразованием. Трехфазный ИБП без сервисного байпаса немыслим.
Надежность
Трехфазные ИБП обычно предназначаются для непрерывной круглосуточной работы. Работа нагрузки должна обеспечиваться практически при любых сбоях питания. Поэтому к надежности трехфазных ИБП предъявляются очень высокие требования. Вот некоторые приемы, с помощью которых производители трехфазных ИБП могут увеличивать надежность своей продукции. Применение разделительных трансформаторов на входе и/или выходе ИБП увеличивает устойчивость ИБП к скачкам напряжения и нагрузки. Входной дроссель не только обеспечивает "мягкий запуск", но и защищает ИБП (и, в конечном счете, нагрузку) от очень быстрых изменений (скачков) напряжения.
Обычно фирма выпускает целый ряд ИБП разной мощности. В двух или трех "соседних по мощности" ИБП этого ряда часто используются одни и те же полупроводники. Если это так, то менее мощный из этих двух или трех ИБП имеет запас по предельному току, и поэтому несколько более надежен. Некоторые трехфазные ИБП имеют повышенную надежность за счет резервирования каких-либо своих цепей. Так, например, могут резервироваться: схема управления (микропроцессор + платы "жесткой логики"), цепи управления силовыми полупроводниками и сами силовые полупроводники. Батарея, как часть ИБП тоже вносит свой вклад в надежность прибора. Если у ИБП имеется возможность гибкого выбора батареи, то можно выбрать более надежный вариант (батарея более известного производителя, с меньшим числом соединений).
Преобразователи частоты
Частота напряжения переменного тока в электрических сетях разных стран не обязательно одинакова. В большинстве стран (в том числе и в России) распространена частота 50 Гц. В некоторых странах (например в США) частота переменного напряжения равна 60 Гц. Если вы купили оборудование, рассчитанное на работу в американской электрической сети (110 В, 60 Гц), то вы должны каким-то образом приспособить к нему нашу электрическую сеть. Преобразование напряжения не является проблемой, для этого есть трансформаторы. Если оборудование оснащено импульсным блоком питания, то оно не чувствительно к частоте и его можно использовать в сети с частотой 50 Гц. Если же в состав оборудования входят синхронные электродвигатели или иное чувствительное к частоте оборудование, вам нужен преобразователь частоты. ИБП с двойным преобразованием энергии представляет собой почти готовый преобразователь частоты.
В самом деле, ведь выпрямитель этого ИБП может в принципе работать на одной частоте, а инвертор выдавать на своем выходе другую. Есть только одно принципиальное ограничение: невозможность синхронизации инвертора с линией статического байпаса из-за разных частот на входе и выходе. Это делает преобразователь частоты несколько менее надежным, чем сам по себе ИБП с двойным преобразованием. Другая особенность: преобразователь частоты должен иметь мощность, соответствующую максимальному возможному току нагрузки, включая все стартовые и аварийные забросы, ведь у преобразователя частоты нет статического байпаса, на который система могла бы переключиться при перегрузке.
Для изготовления преобразователя частоты из трехфазного ИБП нужно разорвать цепь синхронизации, убрать статический байпас (или, вернее, не заказывать его при поставке) и настроить инвертор ИБП на работу на частоте 60 Гц. Для большинства трехфазных ИБП это не представляет проблемы, и преобразователь частоты может быть заказан просто при поставке.
ИБП с горячим резервированием
В некоторых случаях надежности даже самых лучших ИБП недостаточно. Так бывает, когда сбои питания просто недопустимы из-за необратимых последствий или очень больших потерь. Обычно в таких случаях в технике применяют дублирование или многократное резервирование блоков, от которых зависит надежность системы. Есть такая возможность и для трехфазных источников бесперебойного питания. Даже если в конструкцию ИБП стандартно не заложено резервирование узлов, большинство трехфазных ИБП допускают резервирование на более высоком уровне. Резервируется целиком ИБП. Простейшим случаем резервирования ИБП является использование двух обычных серийных ИБП в схеме, в которой один ИБП подключен к входу байпаса другого ИБП.
Рис. 19а. Последовательное соединение двух трехфазных ИБП
На рисунке 19а приведена схема двух последовательно соединенным трехфазных ИБП. Для упрощения на рисунке приведена, так называемая, однолинейная схема, на которой трем проводам трехфазной системы переменного тока соответствует одна линия. Однолинейные схемы часто применяются в случаях, когда особенности трехфазной сети не накладывают отпечаток на свойства рассматриваемого прибора. Оба ИБП постоянно работают. Основной ИБП питает нагрузку, а вспомогательный ИБП работает на холостом ходу. В случае выхода из строя основного ИБП, нагрузка питается не от статического байпаса, как в обычном ИБП, а от вспомогательного ИБП. Только при выходе из строя второго ИБП, нагрузка переключается на работу от статического байпаса.
Система из двух последовательно соединенных ИБП может работать на шести основных режимах.
А. Нормальная работа. Выпрямители 1 и 2 питают инверторы 1 и 2 и, при необходимости заряжают батареи 1 и 2. Инвертор 1 подключен к нагрузке (статический выключатель инвертора 1 замкнут) и питает ее стабилизированным и защищенным от сбоев напряжением. Инвертор 2 работает на холостом ходу и готов "подхватить" нагрузку, если инвертор 1 выйдет из строя. Оба статических выключателя байпаса разомкнуты.
Для обычного ИБП с двойным преобразованием на режиме работы от сети допустим (при сохранении гарантированного питания) только один сбой в системе. Этим сбоем может быть либо выход из строя элемента ИБП (например инвертора) или сбой электрической сети.
Для двух последовательно соединенных ИБП с на этом режиме работы допустимы два сбоя в системе: выход из строя какого-либо элемента основного ИБП и сбой электрической сети. Даже при последовательном или одновременном возникновении двух сбоев питание нагрузки будет продолжаться от источника гарантированного питания.
Б. Работа от батареи 1. Выпрямитель 1 не может питать инвертор и батарею. Чаще всего это происходит из-за отключения напряжения в электрической сети, но причиной может быть и выход из строя выпрямителя. Состояние инвертора 2 в этом случае зависит от работы выпрямителя 2. Если выпрямитель 2 работает (например он подключен к другой электрической сети или он исправен, в отличие от выпрямителя 1), то инвертор 2 также может работать, но работать на холостом ходу, т.к. он "не знает", что с первым ИБП системы что-то случилось. После исчерпания заряда батареи 1, инвертор 1 отключится и система постарается найти другой источник электроснабжения нагрузки. Им, вероятно, окажется инвертор2. Тогда система перейдет к другому режиму работы.
Если в основном ИБП возникает еще одна неисправность, или батарея 1 полностью разряжается, то система переключается на работу от вспомогательного ИБП.
Таким образом даже при двух сбоях: неисправности основного ИБП и сбое сети нагрузка продолжает питаться от источника гарантированного питания.
В. Работа от инвертора 2. В этом случае инвертор 1 не работает (из-за выхода из строя или полного разряда батареи1). СВИ1 разомкнут, СВБ1 замкнут, СВИ2 замкнут и инвертор 2 питает нагрузку. Выпрямитель 2, если в сети есть напряжение, а сам выпрямитель исправен, питает инвертор и батарею.
На этом режиме работы допустим один сбой в системе: сбой электрической сети. При возникновении второго сбоя в системе (выходе из строя какого-либо элемента вспомогательного ИБП) электропитание нагрузки не прерывается, но нагрузка питается уже не от источника гарантированного питания, а через статический байпас, т.е. попросту от сети.
Г. Работа от батареи 2. Наиболее часто такая ситуация может возникнуть после отключения напряжения в сети и полного разряда батареи 1. Можно придумать и более экзотическую последовательность событий. Но в любом случае, инвертор 2 питает нагругку, питаясь, в свою очередь, от батареи. Инвертор 1 в этом случае отключен. Выпрямитель 1, скорее всего, тоже не работает (хотя он может работать, если он исправен и в сети есть напряжение).
После разряда батареи 2 система переключится на работу от статического байпаса (если в сети есть нормальное напряжение) или обесточит нагрузку.
Д. Работа через статический байпас. В случае выхода из строя обоих инверторов, статические переключатели СВИ1 и СВИ2 размыкаются, а статические переключатели СВБ1 и СВБ2 замыкаются. Нагрузка начинает питаться от электрической сети.
Переход системы к работе через статический байпас происходит при перегрузке системы, полном разряде всех батарей или в случае выхода из строя двух инверторов.
На этом режиме работы выпрямители, если они исправны, подзаряжают батареи. Инверторы не работают. Нагрузка питается через статический байпас.
Переключение системы на работу через статический байпас происходит без прерывания питания нагрузки: при необходимости переключения сначала замыкается тиристорный переключатель статического байпаса, и только затем размыкается тиристорный переключатель на выходе того инвертора, от которого нагрузка питалась перед переключением.
Е. Ручной (сервисный) байпас. Если ИБП вышел из строя, а ответственную нагрузку нельзя обесточить, то оба ИБП системы с соблюдением специальной процедуры (которая обеспечивает безразрыное переключение) переключают на ручной байпас. после этого можно производить ремонт ИБП.
Преимуществом рассмотренной системы с последовательным соединением двух ИБП является простота. Не нужны никакие дополнительные элементы, каждый из ИБП работает в своем штатном режиме. С точки зрения надежности, эта схема совсем не плоха:- в ней нет никакой лишней, (связанной с резервированием) электроники, соответственно и меньше узлов, которые могут выйти из строя.
Однако у такого соединения ИБП есть и недостатки. Вот некоторые из них.
- Покупая такую систему, вы покупаете второй байпас (на нашей схеме – он первый – СВБ1), который, вообще говоря, не нужен – ведь все необходимые переключения могут быть произведены и без него.
- Весь второй ИБП выполняет только одну функцию – резервирование. Он потребляет электроэнергию, работая на холостом ходу и вообще не делает ничего полезного (разумеется за исключением того времени, когда первый ИБП отказывается питать нагрузку). Некоторые производители предлагают "готовые" системы ИБП с горячим резервированием. Это значит, что вы покупаете систему, специально (еще на заводе) испытанную в режиме с горячим резервированием. Схема такой системы приведена на рис. 19б.
Рис.19б. Трехфазный ИБП с горячим резервированием
Принципиальных отличий от схемы с последовательным соединением ИБП немного.
- У второго ИБП отсутствует байпас.
- Для синхронизации между инвертором 2 и байпасом появляется специальный информационный кабель между ИБП (на рисунке не показан). Поэтому такой ИБП с горячим резервированием может работать на тех же шести режимах работы, что и система с последовательным подключением двух ИБП. Преимущество "готового" ИБП с резервированием, пожалуй только одно – он испытан на заводе-производителе в той же комплектации, в которой будет эксплуатироваться.
Для расмотренных схем с резервированием иногда применяют одно важное упрощение системы. Ведь можно отказаться от резервирования аккумуляторной батареи, сохранив резервирование всей силовой электроники. В этом случае оба ИБП будут работать от одной батареи (оба выпрямителя будут ее заряжать, а оба инвертора питаться от нее в случае сбоя электрической сети). Применение схемы с общей бетареей позволяет сэкономить значительную сумму – стоимость батареи.
Недостатков у схемы с общей батареей много:
- Не все ИБП могут работать с общей батареей.
- Батарея, как и другие элементы ИБП обладает конечной надежностью. Выход из строя одного аккумулятора или потеря контакта в одном соединении могут сделать всю системы ИБП с горячим резервирование бесполезной.
- В случае выхода из строя одного выпрямителя, общая батарея может быть выведена из строя. Этот последний недостаток, на мой взгляд, является решающим для общей рекомендации – не применять схемы с общей батареей.
Параллельная работа нескольких ИБПКак вы могли заметить, в случае горячего резервирования, ИБП резервируется не целиком. Байпас остается общим для обоих ИБП. Существует другая возможность резервирования на уровне ИБП – параллельная работа нескольких ИБП. Входы и выходы нескольких ИБП подключаются к общим входным и выходным шинам. Каждый ИБП сохраняет все свои элементы (иногда кроме сервисного байпаса). Поэтому выход из строя статического байпаса для такой системы просто мелкая неприятность.
На рисунке 20 приведена схема параллельной работы нескольких ИБП.
Рис.20. Параллельная работа ИБП
На рисунке приведена схема параллельной системы с раздельными сервисными байпасами. Схема система с общим байпасом вполне ясна и без чертежа. Ее особенностью является то, что для переключения системы в целом на сервисный байпас нужно управлять одним переключателем вместо нескольких. На рисунке предполагается, что между ИБП 1 и ИБП N Могут располагаться другие ИБП. Разные производителю (и для разных моделей) устанавливают свои максимальные количества параллеьно работающих ИБП. Насколько мне известно, эта величина изменяется от 2 до 8. Все ИБП параллельной системы работают на общую нагрузку. Суммарная мощность параллельной системы равна произведению мощности одного ИБП на количество ИБП в системе. Таким образом параллельная работа нескольких ИБП может применяться (и в основном применяется) не столько для увеличения надежности системы бесперебойного питания, но для увеличения ее мощности.
Рассмотрим режимы работы параллельной системы
Нормальная работа (работа от сети). Надежность
Когда в сети есть напряжение, достаточное для нормальной работы, выпрямители всех ИБП преобразуют переменное напряжение сети в постоянное, заряжая батареи и питая инверторы.
Инверторы, в свою очередь, преобразуют постоянное напряжение в переменное и питают нагрузку. Специальная управляющая электроника параллельной системы следит за равномерным распределением нагрузки между ИБП. В некоторых ИБП распределение нагрузки между ИБП производится без использования специальной параллельной электроники. Такие приборы выпускаются "готовыми к параллельной работе", и для использования их в параллельной системе достаточно установить плату синхронизации. Есть и ИБП, работающие параллельго без специальной электроники. В таком случае количество параллельно работающих ИБП – не более двух. В рассматриваемом режиме работы в системе допустимо несколько сбоев. Их количество зависит от числа ИБП в системе и действующей нагрузки.
Пусть в системе 3 ИБП мощностью по 100 кВА, а нагрузка равна 90 кВА. При таком соотношении числа ИБП и их мощностей в системе допустимы следующие сбои.
Сбой питания (исчезновение напряжения в сети)
Выход из строя любого из инверторов, скажем для определенности, инвертора 1. Нагрузка распределяется между двумя другими ИБП. Если в сети есть напряжение, все выпрямители системы работают.
Выход из строя инвертора 2. Нагрузка питается от инвертора 3, поскольку мощность, потребляемая нагрузкой меньше мощности одного ИБП. Если в сети есть напряжение, все выпрямители системы продолжают работать.
Выход из строя инвертора 3. Система переключается на работу через статический байпас. Нагрузка питается напрямую от сети. При наличии в сети нормального напряжения, все выпрямители работают и продолжают заряжать батареи. При любом последующем сбое (поломке статического байпаса или сбое сети) питание нагрузки прекращается. Для того, чтобы параллельная система допускала большое число сбоев, система должна быть сильно недогружена и должна включать большое число ИБП. Например, если нагрузка в приведенном выше примере будет составлять 250 кВА, то система допускает только один сбой: сбой сети или поломку инвертора. В отношении количества допустимых сбоев такая система эквивалентна одиночному ИБП. Это, кстати, не значит, что надежность такой параллельной системы будет такая же, как у одиночного ИБП. Она будет ниже, поскольку параллельная система намного сложнее одиночного ИБП и (при почти предельной нагрузке) не имеет дополнительного резервирования, компенсирующего эту сложность.
Вопрос надежности параллельной системы ИБП не может быть решен однозначно. Надежность зависит от большого числа параметров: количества ИБП в системе (причем увеличение количества ИБП до бесконечности снижает надежность – система становится слишком сложной и сложно управляемой – впрочем максимальное количество параллельно работающих модулей для известных мне ИБП не превышает 8), нагрузки системы (т.е. соотношения номинальной суммарной мощности системы и действующей нагрузки), примененной схемы параллельной работы (т.е. есть ли в системе специальная электроника для обеспечения распределения нагрузки по ИБП), технологии работы предприятия. Таким образом, если единственной целью является увеличение надежности системы, то следует серьезно рассмотреть возможность использование ИБП с горячим резервированием – его надежность не зависит от обстоятельств и в силу относительной простоты схемы практически всегда выше надежности параллельной системы.
Недогруженная система из нескольких параллельно работающих ИБП, которая способна реализвать описанную выше логику управления, часто также называется параллельной системой с резервированием.
Если нагрузка параллельной системы такова, что с ней может справиться меньшее, чем есть в системе количество ИБП, то инверторы "лишних" ИБП могут быть отключены. В некоторых ИБП такая логика управления подразумевается по умолчанию, а другие модели вообще лишены возможности работы в таком режиме. Инверторы, оставшиеся включенными, питают нагрузку. Коэффициент полезного действия системы при этом несколько возрастает. Обычно в этом режиме работы предусматривается некоторая избыточность, т.е. количестов работающих инверторов больше, чем необходимо для питания нагрузки. Тем самым обеспечивается резервирование. Все выпрямители системы продолжают работать, включая выпрямители тех ИБП, инверторы которых отключены.
В случае исчезновения напряжения в электрической сети, параллельная система переходит на работу от батареи. Все выпрямители системы не работают, инверторы питают нагрузку, получая энергию от батареи. В этом режиме работы (естественно) отсутствует напряжение в электрической сети, которое при нормальной работе было для ИБП не только источником энергии, но и источником сигнала синхронизации выходного напряжения. Поэтому функцию синхронизации берет на себя специальная параллельная электроника или выходная цепь ИБП, специально ориентированная на поддержание выходной частоты и фазы в соответствии с частотой и фазой выходного напряжения параллельно работающего ИБП.
Это режим, при котором вышли из строя один или несколько выпрямителей. ИБП, выпрямители которых вышли из строя, продолжают питать нагрузку, расходуя заряд своей батареи. Они выдает сигнал "неисправность выпрямителя". Остальные ИБП продолжают работать нормально. После того, как заряд разряжающихся батарей будет полностью исчерпан, все зависит от соотношения мощности нагрузки и суммарной мощности ИБП с исправными выпрямителями. Если нагрузка не превышает перегрузочной способности этих ИБП, то питание нагрузки продолжится (если у системы остался значительный запас мощности, то в этом режиме работы допустимо еще несколько сбоев системы). В случае, если нагрузка ИБП превышает перегрузочную способность оставшихся ИБП, то система переходит к режиму работы через статический байпас.
Если оставшиеся в работоспособном состоянии инверторы могут питать нагрузку, то нагрузка продолжает работать, питаясь от них. Если мощности работоспособных инверторов недостаточно, система переходит в режим работы от статического байпаса. Выпрямители всех ИБП могут заряжать батареи, или ИБП с неисправными инверторами могут быть полностью отключены для выполнения ремонта.
Работа от статического байпаса
Если суммарной мощности всех исправных инверторов параллельной системы не достаточно для поддержания работы нагрузки, система переходит к работе через статический байпас. Статические переключатели всех инверторов разомкнуты (исправные инверторы могут продолжать работать). Если нагрузка уменьшается, например в результате отключения части оборудования, параллельная система автоматически переключается на нормальный режим работы.
В случае одиночного ИБП с двойным преобразованием работа через статический байпас является практически последней возможностью поддержания работы нагрузки. В самом деле, ведь достаточно выхода из строя статического переключателя, и нагрузка будет обесточена. При работе параллельной системы через статический байпас допустимо некоторое количество сбоев системы. Статический байпас способен выдерживать намного больший ток, чем инвертор. Поэтому даже в случае выхода из строя одного или нескольких статических переключателей, нагрузка возможно не будет обесточена, если суммарный допустимый ток оставшихся работоспособными статических переключателей окажется достаточен для работы. Конкретное количество допустимых сбоев системы в этом режиме работы зависит от числа ИБП в системе, допустимого тока статического переключателя и величины нагрузки.
Если нужно провести с параллельной системой ремонтные или регламентные работы, то система может быть отключена от нагрузки с помощью ручного переключателя сервисного байпаса. Нагрузка питается от сети, все элементы параллельной системы ИБП, кроме батарей, обесточены. Как и в случае системы с горячим резервированием, возможен вариант одного общего внешнего сервисного байпаса или нескольких сервисных байпасов, встроенных в отдельные ИБП. В последнем случае при использовании сервисного байпаса нужно иметь в виду соотношение номинального тока сервисного байпаса и действующей мощности нагрузки. Другими словами, нужно включить столько сервисных байпасов, чтобы нагрузка не превышала их суммарный номинальных ток.
[ http://www.ask-r.ru/info/library/ups_without_secret_7.htm]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > трехфазный источник бесперебойного питания (ИБП)
-
11 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
12 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
13 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
14 сигнал
cue, indication, message, U signal, signal, signal waveform* * *сигна́л м.
signalвосстана́вливать сигна́л — regenerate a signalвосстана́вливать фо́рму сигна́ла — regenerate a signalсигна́л выделя́ется, напр. на нагру́зочном сопротивле́нии — the signal is developed, e. g., across the load resistorдетекти́ровать сигна́л — detect [demodulate] a signalзаде́рживать сигна́л — delay a signalзаме́шивать [сме́шивать] сигна́л жарг. — combine [mix] a signal (with …)запомина́ть сигна́л в инверти́рованной фо́рме вчт. — store a signal in inverted [negated] form, store an inverted [negated] signalсигна́л име́ет ограни́ченную полосу́ часто́т — the signal is band-limitedинверти́ровать сигна́л — invert [negate] a signalсигна́л искажа́ется шу́мом — the signal is corrupted by noiseквантова́ть сигна́л по вре́мени — sample a signalквантова́ть сигна́л по у́ровню — quantize a signalограни́чивать сигна́л све́рху — limit the signal, flatten the signal at the positive peakограни́чивать сигна́л сни́зу — clip the signal, flatten the signal at the negative peakпо сигна́лу — in response [according] to a signalавтопило́т управля́ет самолё́том по сигна́лу от … — the autopilot flies [controls, steers] the airplane in response [according] to a signal from …опера́ция счи́тывания начина́ется по сигна́лу «x [m2]» — the “x ” signal initiates a read operation, the “x ” signal causes a read operation to be initiatedпо сигна́лу «x [m2]» схе́ма сраба́тывает — the “x ” signal causes the circuit to operateпреобразо́вывать ана́логовый сигна́л в дискре́тный — digitize an analog signalсигна́л разветвля́ется в то́чке A — at A point the signal tracks [follows] different pathsсигна́л си́льно заби́т шума́ми — the signal is deeply buried in noise, the signal is obscured by noiseскла́дывать сигна́лы A и B — combine signals A and B, combine signal A with signal Bсогласо́вывать сигна́лы по вре́мени — time signalsформирова́ть сигна́л — generate [produce, provide] a signalавари́йный сигна́л — alarm (signal), emergency signalакусти́ческий сигна́л — audible [audio, acoustic(al) ] signalамплиту́дно-модули́рованный сигна́л — amplitude-modulated [AM] signalсигна́л бе́дствия — distress signalви́димый сигна́л — visual signalвходно́й сигна́л — input [incoming] signalвходно́й, синусоида́льный сигна́л ( вид стандартного испытательного сигнала) — sinusoidal excitationвызывно́й сигна́л тлф. — call [ringing] signalвыходно́й сигна́л — output signalвыходно́й сигна́л повторя́ет входно́й сигна́л — the output (signal) follows [tracks] the input (signal)сигна́л гаше́ния — blank(ing) signalгеодези́ческий сигна́л — observing towerгетероди́нный сигна́л — ( в приёмниках) heterodyne [local-oscillator] signal, heterodyne [local-oscillator] frequency; ( в передатчиках) injection [conversion] signal, injection [conversion] frequencyсигна́л гото́вности — ready signalсигна́л гото́вности к приё́му ( в фототелеграфии) — ready-to-receive signalсигна́л гото́вности к приё́му набо́ра но́мера — dial toneабоне́нту посыла́ется сигна́л гото́вности ста́нции к приё́му набо́ра но́мера — a dial tone informs the user that it is proper to make the callгруппово́й сигна́л ( в многоканальной связи) — composite signalсигна́л для вхожде́ния в сеть радио — netting callсигна́л забо́я оши́бки телегр. — erasure signalсигна́л закры́тия (сеа́нса) свя́зи — closing-down [end-of-work] sign(al)сигна́л за́нятости тлф. — (audible) busy signal, busy toneсигна́л за́нятости, мига́ющий тлф. — busy flash signalсигна́л за́писи вчт. — write signalзапреща́ющий сигна́л — inhibit signalсигна́л запро́са — challenging [interrogation] signalзатуха́ющий сигна́л — decaying signalзвуково́й сигна́л — audible [sound, audio] signalзвуково́й, автомоби́льный сигна́л — motor car hornзонди́рующий сигна́л ( в дискретных системах передачи) — sounding signalзу́ммерный сигна́л — buzzer signalизбира́тельный сигна́л — selective signalизбы́точный сигна́л — redundant signalсигна́л изображе́ния тлв. — picture signalсигна́л изображе́ния и синхрониза́ции тлв. — composite [sync-and-picture] signalи́мпульсный сигна́л ( результат квантования по времени) — sampled signal, signal sampleи́мпульсный, входно́й сигна́л ( форма испытательного сигнала) — impulse input (function)и́мпульсный, выходно́й сигна́л ( отклик на выходной сигнал) — impulse (function) responseиндивидуа́льный сигна́л ( в многоканальной связи) — channel signalинформацио́нный сигна́л — intelligence signalсигна́л ка́дровой синхрониза́ции — frame [vertical] sync signalкванто́ванный сигна́л (по амплитуде, по уровню) — quantized signalконтро́льный сигна́л — monitor(ing) signalсигна́л контро́ля посы́лки вы́зова — call-confirmation signalсигна́л конца́ ле́нты вчт. — end-of-tape [EOT] signalсигна́л конца́ сообще́ния вчт. — end-of-message [EOM] signalлине́йный сигна́л ( вид испытательного сигнала) — ramp input, ramp functionло́жный сигна́л — spurious [false] signalсигна́л, модули́рованный по амплиту́де — amplitude-modulated [AM] signalсигна́л, модули́рованный по фа́зе — phase-modulated [FM] signalсигна́л, модули́рованный по частоте́ — frequency-modulated [FM] signalмодули́рующий сигна́л1. modulating signal2. (в проводной высокочстотной, а также радиосвязи — информационный сигнал до переноса в другой частотный диапазон или до модуляции несущей или поднесущей) baseband signalмо́дулирующий, тона́льный сигна́л ( в системах передачи данных) — baseband signalсигна́л на вы́ходе телека́меры — camera signalсигна́л недосту́пности но́мера тлф. — out-of-order [trouble] toneсигна́л неиспра́вности — fault signalнепреры́вный сигна́л — analog [continuous] signalнеразбо́рчивый сигна́л радио — unreadable signalсигна́л обра́тной свя́зи — feedback signalсигна́л обры́ва програ́ммы радио — program(me) failure alarmобъединё́нный сигна́л ( в многоканальной связи) — combined signalразделя́ть объединё́нный сигна́л по кана́лам — separate the combined signal into channelsограни́ченный сигна́л — bounded signalсигна́л, ограни́ченный по частоте́ — band-limited signalоднополо́сный сигна́л [ОПС] — single-sideband SSB signal (см. тж. ОПС)сигна́л опознава́ния цве́та ( в системе СЕКАМ) тлв. — colour identification signalопознава́тельный сигна́л — identification signalопо́рный сигна́л — reference signalопти́ческий сигна́л — optical signalсигна́л остано́вки — stop sign(al)сигна́л отбо́я тлф. — ringoff [clearing] signalсигна́л отбо́я со стороны́ вызыва́емого абоне́нта тлф. — clear-forward signalсигна́л отве́та АТС ( приглашение к набору) — proceed-to-select signalсигна́л отве́та ( приглашение к передаче) [m2]ручно́й ста́нции — proceed-to-transmit signalсигна́л отпира́ния ЭЛТ — (CRT) unblank signalотражё́нный сигна́л — echo (signal), return signal (e. g., from the target)сигна́л оши́бки — error signalсигна́л оши́бки ориента́ции (напра́вленной) анте́нны — pointing error signalсигна́л перено́са вчт. — carry (signal)сигна́л переполне́ния вчт. — overflow signalпериоди́ческий сигна́л — periodic signalпобо́чный сигна́л радио — spurious signalподавля́емый сигна́л — victim signalсигна́л подтвержде́ния — acknowledgement [ACK] signalпожа́рный сигна́л — fire-alarm signalпозывно́й сигна́л радио — call sign(al), call letterполе́зный сигна́л (в противовес наводке, шумам или помехе) — legitimate [valid] signalпо́лный сигна́л тлв. — composite colour [picture] signalсигна́л поме́хи ( от глушащих станций) — electronic countermeasure [ECM] signalпотенциа́льный сигна́л — level signalпредупреди́тельный сигна́л — warning signalпреры́вистый сигна́л — intermittent signalсигна́л ( сигнальная комбинация) пробе́ла — space signalпростра́нственно-модули́рованный сигна́л — spatially modulated signalпсевдослуча́йный сигна́л — pseudorandom signalпусково́й сигна́л — starting signalсигна́л рассогласова́ния — error signalсигна́л с акти́вной па́узой — non-return-to-zero [NRZ] signalсветово́й сигна́л — light signal; ( световое табло) light annunciator, illuminated call-outсинфа́зный сигна́л — common-mode [in-phase] signalсинхронизи́рующий сигна́л — synchronizing signalсигна́л систе́мы поса́дки по прибо́рам, просто́й — ( для международной системы) raw ILS signal; ( для советской системы) raw СП signalсоставно́й сигна́л — composite signalсигна́л с пасси́вной па́узой — return-to-zero [RZ] signalсигна́л с пода́вленной несу́щей — suppressed-carrier signalстациона́рный сигна́л — stationary [non-time-varying] signalсигна́л стира́ния оши́бки ( в буквопечатающих аппаратах) — erasure signalстроби́рующий сигна́л — gate [gating] signalступе́нчатый сигна́л ( результат квантования по уровню) — quantized signal, quantized waveformступе́нчатый, входно́й сигна́л ( форма испытательного сигнала) — step input (junction)ступе́нчатый, выходно́й сигна́л ( отклик на входной сигнал) — step (function) responseсигна́л счи́тывания вчт. — read(ing) [sense] signalсигна́л тона́льного вы́зова тлф. — call toneсигна́л то́чного вре́мени — (standard) time signalпередава́ть сигна́лы то́чного вре́мени ( по радио) — broadcast [distribute] (standard) time signalsтрево́жный сигна́л — alarm signalсигна́л уклоне́ния от ку́рса навиг. — off course warningуправля́ющий сигна́л — control signalупрежда́ющий сигна́л — anticipatory signalсигна́л установле́ния соедине́ния тлф., телемех. — call-connected signalхрони́рующий сигна́л — timing signalсигна́л цве́тности тлв. — ( до модуляции поднесущей) chrominance [video colour-difference] signal; ( после модуляции поднесущей) chroma [modulated subcarrier] signalсигна́л цветны́х поло́с, испыта́тельный тлв. — colour-bar-chart signalцветово́й сигна́л тлв. — colour signalчасто́тно-модули́рованный сигна́л — frequency-modulated [FM] signalшумово́й сигна́л — noise (signal)15 дифференциальный манометр
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.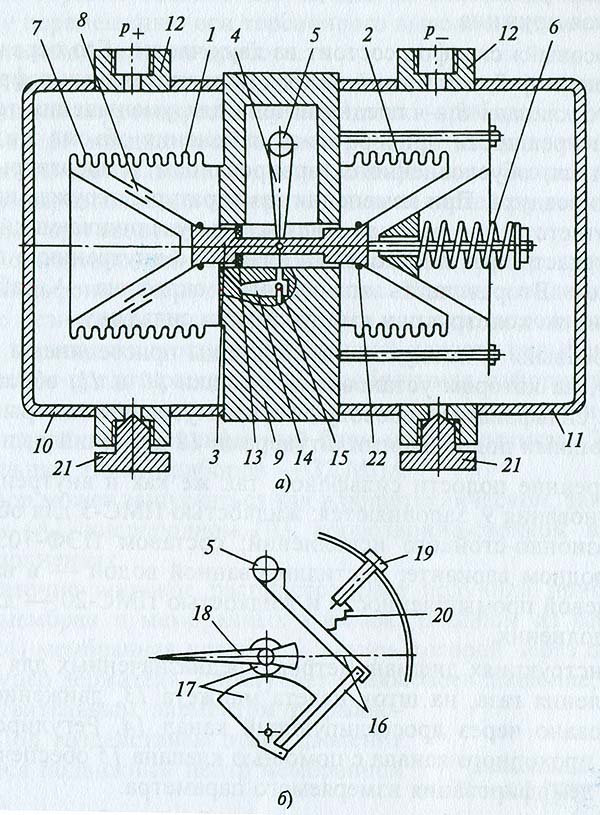
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
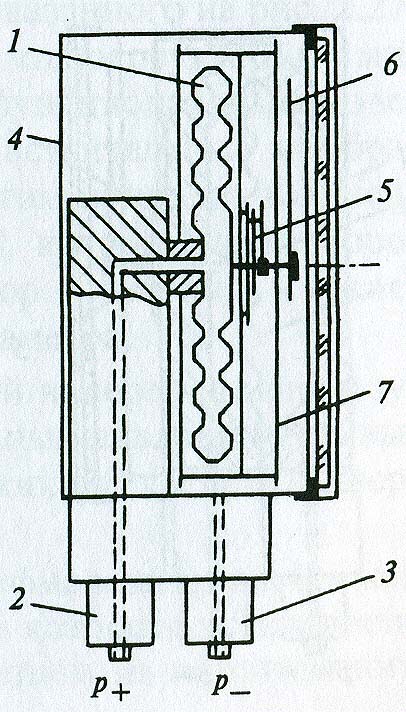
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
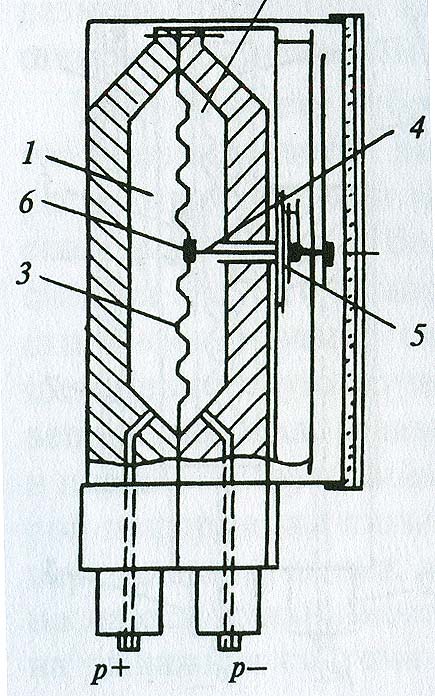
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.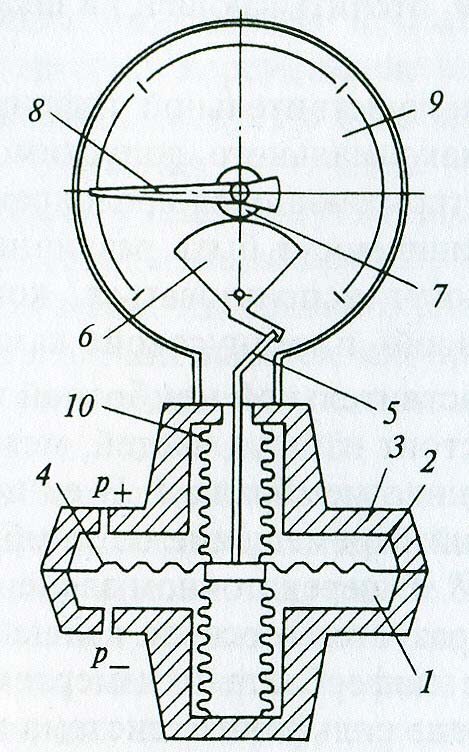
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.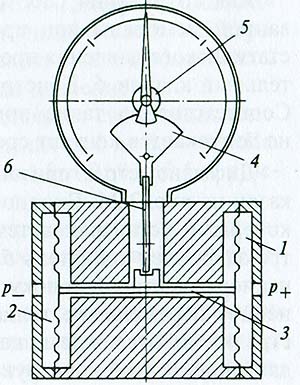
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.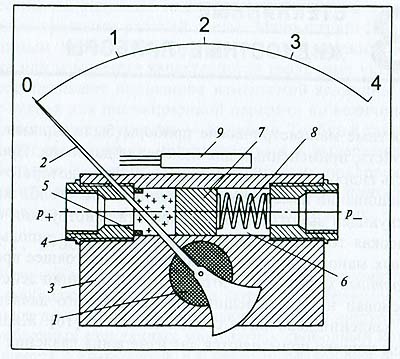
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
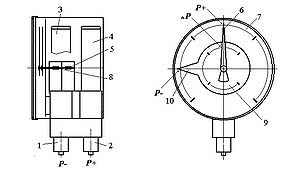
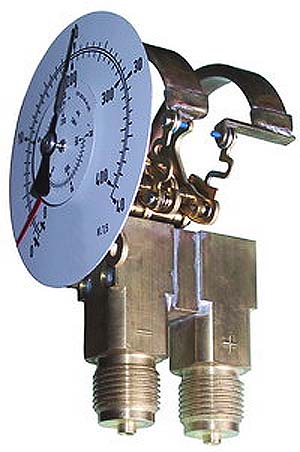
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > дифференциальный манометр
16 комбинационное рассеяние
комбинационное рассеяние
Двухфотонный процесс рассеяния, при котором один фотон поглощается, а другой испускается, причем частота испущенного фотона равна сумме или разности частот поглощенного фотона и внутримолекулярных колебаний рассеивающего вещества.
[Сборник рекомендуемых терминов. Выпуск 75. К вантовая электроника. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
Обобщающие термины
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > комбинационное рассеяние
17 перегородка (в здании)
перегородка
Ненесущая внутренняя вертикальная ограждающая конструкция, разделяющая помещения
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Перегородки являются планировочным элементом, с помощью которого пространство, заключенное между несущими стенами, разделяется на помещения в соответствии с их функциональным назначением.
В отличие от наружных и внутренних несущих стен, воспринимающих все силовые воздействия, действующие на здание, перегородки никаких нагрузок не несут, кроме собственного веса.
В зависимости от назначения перегородки делятся на ограждающие и выгораживающие.
Ограждающие перегородки полностью изолируют помещения друг от друга по всей высоте, выгораживающие - лишь на определенную высоту или части помещения. К ограждающим перегородкам предъявляются большие требования в части звукоизолирующей способности, и их диапазон в этой части находится в пределах от 30 до 50 децибел.
Нижний предел обеспечивается при весе однородной конструкции от 20 до 100 кг/м2, верхний предел при весе от 150 до 270 кг/м2.
Звукоизолирующая способность перегородок определяется на основании расчетов и требует специальных знаний и навыка. Вместо расчетов можно пользоваться данными таблиц, позволяющими без особых затрат времени выбрать нужную конструкцию и материал перегородки. Из табличных характеристик можно сделать вывод, что звукоизолирующая способность перегородок в пределах 40-50 дб характерна для междуквартирных, а 30-40 дб - для межкомнатных перегородок.
Если в перегородке предусмотрена хотя бы одна дверь, то ее звукоизолирующая способность должна находиться в пределах 30 дб. При необходимости повысить ее уровень изменяется конструкция дверного полотна.
В связи с распространением звука через неплотности сопряжения, поры материала, а при ударном воздействии, через конструкцию, особое внимание следует уделить герметизации мест сопряжения звукоизолирующими материалами и конструктивными преградами.
Перегородки могут быть межквартирными, толщиной не менее 20 см, и межкомнатными, толщиной не менее 10 см. И те, и другие обычно делают из прочных малосгораемых, тепло- и звукопроводных материалов. Деревянные перегородки оштукатуривают.
Перегородки из тонких бревен или пластин чаще всего устанавливают между квартирами или когда 'хотят теплое помещение отделить от холодного.
Наиболее легкие перегородки - дощатые и каркасные. Они могут быть установлены непосредственно по балкам или лагам без устройства фундамента.
Самая простая - дощатая однослойная перегородка из вертикально поставленных досок толщиной 40-60 мм.
Самой экономичной по расходу материалов является каркасная перегородка.
Капитальными называют перегородки из кирпича, гипса (алебастра), шлако- или опилкобетона. Они огнестойки и имеют хорошие звукозащитные качества.
Самыми прочными, самыми долговечными зарекомендовали себя перегородки кирпичные.
Расположение перегородок по отношению к балкам
Перегородка опирается на балку, и с двух сторон ее закрепляют брусками, сечение которых равно сечению половых досок, а бруски закрывают плинтусами.
При установке перегородок вдоль балок между последними врубают особые бруски, называемые ШПАЛАМИ, на которые крепят лагу - лежень.
Иногда в лаге выбирают паз для досок перегородок (в балках его не выбирают). В этом случае в лагах обязательно крепят диафрагму - доску, поставленную на ребро.
Для установки перегородки поперек балок для нее кладут лаги и закрепляют их, а род лагами устраивают диафрагму.
Ее назначение - снизить различные звуки, которые могут проникать через перекрытие, а также удержать тепло и обособить перекрытие друг от друга.
Выполнение перегородок Между потолком и перегородкой обычно ставят зазор на величину осадки (не менее 10 см), который заполняют паклей, смоченной в гипсовом растворе. Перегородки можно" ставить и после окончательной осадки дома, примерно через год после его постройки.
Перегородки из тонких бревен или пластин достаточно тяжелые, поэтому их нужно возводить на балке с подготовленными под нее столбиками.
Бревна такой перегородки обычно притесывают, конопатят, штукатурят, а в обвязках крепят прямыми шипами.
Если при выполнении дощатой однослойной перегородки применяют чисто обрезанные доски без боковых пахов и гребней, их нужно скреплять между собой через 1 -1,5 м по высоте деревянными шпонками или косыми гвоздями.
Такие перегородки обшивают листовыми материалами (фанерой, древесноволокнистыми плитами, плотным картоном) и оштукатуривают. Чтобы уменьшить поперечное коробление широких досок, их раскалывают на более узкие и делают местные трещины.
Звукоизоляция отдельных дощатых перегородок невысокая, поэтому применять их для звукоограждения жилых помещений, особенно спальных комнат, не рекомендуется.
Устанавливают перегородку таким образом. На потолке крепят доску, к которой с одной стороны прибивают треугольный брусок. Затем ставят доски и закрепляют их вторым бруском. К балкам и потолку можно прибить бруски, образующие паз.
С одной стороны перегородки верхний и нижний бруски делают короче на 25-30 см, что необходимо для вставки досок. Сами же доски должны быть на 1 см короче расстояния между обвязкой. Широкие доски надкалывают, а потом в места надкола забивают небольшие клинья и вставляют доски в пазы. Для жесткости их между собой связывают шипами, устанавливаемыми через 100-140 см, но вместо шипов можно использовать и гвозди.
Более надежны по звукоизоляционным качествам двух- и трехслойные дощатые перегородки с внутренней прокладкой из пергамина (строительной бумаги), картона или старых газет (3-4 слоя). В таком случае можно использовать более тонкие доски различной длины, но сбитые заранее в готовые щиты.
Двойные дощатые перегородки чаще всего собирают из щитов шириной 50-60 см с четвертями по кромкам.
Из длинных досок двойные дощатые перегородки делать не следует.
Для большей жесткости на вертикально скрепленные доски можно набить второй слой досок под углом 45 градусов, то есть по диагонали. Между этими слоями можно проложить толь, картон или пергамин.
Для каркасной перегородки применяют бруски или доски толщиной 50-70 мм, которые в зависимости от гибкости листовой или погонажной обшивки устанавливают на расстоянии 40-60 см.
Лучший материал для обшивки каркасных перегородок - фанера толщиной 6-8 мм или листы сухой гипсокартонной штукатурки толщиной 10-14 мм. Древесноволокнистые плиты (ДВП) толщиной 4 мм не годятся для обшивки, потому что при переменной влажности они коробятся.
Каркасно-обшивные перегородки состоят из обвязки, стоек и обшивки. При необходимости между стойками ставят дверную коробку.
Стойки делают из брусков или досок, сечение которых зависит от толщины перегородок. Ставят стойки через 40-120 см друг от друга, а крепят к обвязке шипами или гвоздями, обшивка - тесовая.
Широкие доски надкалывают. Сначала обшивку полностью пробивают с одной стороны, затем с другой. Если перегородку утепляют, то вторую сторону зашивают не сразу, а рядами.
Прибив несколько досок на высоту 50-100 см, пространство между обшивкой засыпают шлаком, опилками с известью и гипсом. Иногда вместо сухой засыпки используют густую массу, которая требует тщательной сушки. В таком случае стойки рекомендуется ставить чаще, а перегородки оштукатуривать мокрой штукатуркой или обивать различными листами (сухой штукатуркой, древес-новолокнистыми листами, фанерой и т. д.).
Стойки для перегородок с заполнителем из плит камыша и соломы делают по толщине утеплительных плит, а размещают на расстоянии их ширины.
Укрепив стойки, между ними ставят камышитовые (соломитовые) плиты и крепят гвоздями, на которые предварительно надевают шайбы диаметром 2-2,5 см.
Крепить плиты к доскам можно и на дощатую обивку. Все щели между плитами конопатят или промазывают гипсовым раствором и штукатурят.
Но их можно применять двойными, склеив предварительно шероховатыми поверхностями попарно, во влажном состоянии, под равномерно распределенной нагрузкой.
При обшивке каркаса под них желательно подложить слой пергамина или картона. Для улучшения звукоизоляции пространство между обшивками можно заполнить опилкобетоном, стружками или старыми газетами.
Если дощатые или каркасные стены устраивают в ванной или душевой, внутреннюю поверхность оштукатуривают цементным раствором или обшивают асбестоцементными листами, а пространство внутри каркаса оставляют свободным с естественной циркуляцией воздуха.
Для перегородок из кирпича, гипса (алебастра), шлако- или опилкобетона требуются либо самостоятельные фундаменты, либо жесткое железобетонное перекрытие. Лишь тонкие перегородки из гипса и опилкобетона можно в отдельных случаях опирать непосредственно на деревянные балки или лаги.
При этом балки должны быть усилены, иметь пролет не менее 3 см, а сами перегородки следует проармировать, чтобы избежать деформационных трещин.
Перегородки из кирпича и шлакобетона можно делать лишь по железобетонному перекрытию или на мелких фундаментах, закладываемых в теплом подполье.
В домах с проветриваемым подпольем и деревянным цокольным перекрытием такие перегородки применять не нужно, потому что для них необходимо устройство заглубленных фундаментов.
Гипсовые перегородки обычно выкладывают из готовых блоков заводского или индивидуального изготовления. Их размеры выбирают с таким расчетом, чтобы масса блока не превышала 25-30 кг. Оптимальная толщина гипсовой перегородки - 8 см.
Поскольку гипс быстро твердеет и набирает прочность, из него в условиях строительства даже при наличии одной разборной формы можно за короткий срок изготовить много отдельных блоков - 3-4 за один час.
Для экономии и облегчения массы блока гипс перед затворением водой смешивают с опилками или шлаком в пропорции 1:2 или 1:4 (по объему).
Готовые гипсовые блоки можно укладывать в перегородку практически на любом растворе: гипсопесчаном, цементно-песчаном, глинопесчаном, цементно-известковом и т. д.
Для плотного прилегания друг к другу блоки формуют с внутренними горизонтальными или вертикальными пазами, которые заполняют раствором в процессе кладки.
Если необходимо, в горизонтальные швы для прочности укладывают проволоку, покрытую антикоррозийным составом (битумом или лаком), или тонкие деревянные рейки. При хорошем формовании и аккуратной укладке блоков поверхность гипсовой перегородки получается достаточно ровной и требует лишь затирки горизонтальных и вертикальных швов.
В отличие от гипса, шлакобетон и особенно опилкобетон сохнут и твердеют медленно, поэтому изготовление из них перегородок требует длительного времени и одновременного использования нескольких форм.
Объемный состав бетона и технология изготовления блоков могут быть применены при возведении внутренних перегородок. При тщательном формовании и аккуратной кладке поверхность таких перегородок также получается достаточно ровной и в большинстве случаев требует лишь затирки монтажных швов. Оптимальная толщина перегородок из легких бетонов - 10-12 см.
Для возведения кирпичных перегородок используют кирпич, укладывая его либо плашмя вдоль перегородки (толщина 120 мм), либо на ребро (65 и 88 мм). Лучше всего использовать красный кирпич, силикатный или сырец. Можно также использовать шлакобетонные камни, но они более толстые и уменьшают площадь помещений.
Кладку кирпичных перегородок ведут впустошовку на цементно-песчаном растворе с добавлением известкового или песчаного теста. Перегородки, выкладываемые на ребро, при их длине не более 1,5 м армируют через 3-5 рядов проволокой диаметром 3-6 мм.
Поверхность кирпичных перегородок оштукатуривают или облицовывают керамической плиткой (в санитарных узлах, вдоль кухонного оборудования).[ http://brigadamasterov.ru/fotofile/peregorodki]
Тематики
Обобщающие термины
Действия
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > перегородка (в здании)
18 проходной парамагнитный квантовый усилитель
проходной парамагнитный квантовый усилитель
Резонаторный квантовый парамагнитный усилитель, в котором один элемент связи используется для ввода сигнала в активное вещество, а другой — для вывода усиленного сигнала.
[Сборник рекомендуемых терминов. Выпуск 75. К вантовая электроника. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
Обобщающие термины
EN
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > проходной парамагнитный квантовый усилитель
19 дифференциальный манометр
- differential-pressure gage
- differential pressure indicator
- differential pressure gage
- differential manometer
- differential gauge pressure
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-английский словарь нормативно-технической терминологии > дифференциальный манометр
20 комбинационное рассеяние
комбинационное рассеяние
Двухфотонный процесс рассеяния, при котором один фотон поглощается, а другой испускается, причем частота испущенного фотона равна сумме или разности частот поглощенного фотона и внутримолекулярных колебаний рассеивающего вещества.
[Сборник рекомендуемых терминов. Выпуск 75. К вантовая электроника. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
Обобщающие термины
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > комбинационное рассеяние
Страницы- 1
- 2
См. также в других словарях:
диапазон — сущ., м., употр. сравн. часто Морфология: (нет) чего? диапазона, чему? диапазону, (вижу) что? диапазон, чем? диапазоном, о чём? о диапазоне; мн. что? диапазоны, (нет) чего? диапазонов, чему? диапазонам, (вижу) что? диапазоны, чем? диапазонами, о… … Толковый словарь Дмитриева
Диапазон применимости — (диапазон количественной оценки/линейность/динамический диапазон): количественный интервал, внутри которого, как показано совместными испытаниями или другой подходящей процедурой валидации, аналитическая процедура имеет достаточный уровень… … Официальная терминология
Диапазон — от греч. δϊα πασον (χορδων) через все (струны) Диапазон интервал значений какой либо величины. Есть несколько различных знаков, которыми может быть обозначен диапазон при письме и печати. Диапазон частот Динамический диапазон Диапазон в… … Википедия
X-диапазон — Частотный спектр Радар: 8 12 ГГц Связь: 7 10,7 ГГц Спектр длин волн Радар: от 3,75 до 2,5 см Классификация ITU (рус.) КНЧ СНЧ ИНЧ ОНЧ … Википедия
Динамический диапазон — Динамический диапазон: Динамический диапазон (техника) характеристика устройства или системы, предназначенной для преобразования, передачи или хранения некой величины (мощности, силы, напряжения, звукового давления, представляющая логарифм… … Википедия
СВЕРХВЫСОКИХ ЧАСТОТ ДИАПАЗОН — частотный диапазон электромагнитного излучения (100е300 000 млн. герц), расположенный в спектре между ультравысокими телевизионными частотами и частотами дальней инфракрасной области. Этот частотный диапазон соответствует длинам волн от 30 см до… … Энциклопедия Кольера
Чтения диапазон — – приблизительно объём письменного текста, который может быть воспринят за одну паузу фиксации (см.). Обычно воспринимается от 7 до 10 знаков одновременно. На самом деле это число может быть и другим, как меньшим, так и большим, поскольку на него … Энциклопедический словарь по психологии и педагогике
Маска подсети — В терминологии сетей TCP/IP маской подсети или маской сети называется битовая маска, определяющая, какая часть IP адреса узла сети относится к адресу сети, а какая к адресу самого узла в этой сети. Например, узел с IP адресом 12.34.56.78 и… … Википедия
Маска сети — В терминологии сетей TCP/IP маской подсети или маской сети называется битовая маска, определяющая, какая часть IP адреса узла сети относится к адресу сети, а какая к адресу самого узла в этой сети. Например, узел с IP адресом 12.34.56.78 и маской … Википедия
IEEE 802.11h-2003 — IEEE 802.11h 2003, или 802.11h, разработан с целью эффективного управления мощностью излучения передатчика, выбором несущей частоты передачи и генерации нужных отчетов. Он вносит некоторые новые алгоритмы в протокол доступа к среде MAC (Media… … Википедия
IEEE 802.11h — 2003, или 802.11h, разработан с целью эффективного управления мощностью излучения передатчика, выбором несущей частоты передачи и генерации нужных отчетов. Он вносит некоторые новые алгоритмы в протокол доступа к среде MAC (Media Access Control,… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский